这里介绍了一些几何算法
有关面积的计算
三角形面积的计算
有很多的方法:
知道三条边长a,b,c的话可以使用海伦公式:
$$ p = \frac{1}{2}(a + b + c) \ S = \sqrt{p(p-a)(p-b)(p-c)} $$
知道三个顶点可以使用向量叉积:
$$ S = |\frac{1}{2}\vec{AB} \times \vec{AC}| = |\frac{1}{2}|\vec{AB}||\vec{AC}|\sin{\theta}| $$
四边形的面积计算
知道四条边长:
$$ p = \frac{1}{2}(a+b+c+d) \ S = \sqrt{p(p-a)(p-b)(p-c)(p-d)} $$
平行四边形,知道四个顶点坐标:
$$ S = \vec{AB} \times \vec{AC} $$
不规则多边形面积计算
其实也很简单,将多边形拆成多个三角形即可,使用$S=\frac{\vec{AB}\times \vec{AC}}{2}$:
假设顶点是顺时针排列的(记为$V[i]$)。我们可以在空间中任选一点$P$,然后顺时针遍历顶点并构造三角形,然后计算所有三角形面积再求和:
$$ S = \frac{1}{2}(\vec{PV_0} \times \vec{PV_1} + \vec{PV_1} \times \vec{PV_2} + \cdots \vec{PV_{n-1}} \times \vec{PV_n} + \vec{PV_n} \times \vec{PV_0}) $$
很容易可以看出这个公式在做什么:
假设点在多边形内,那么有:
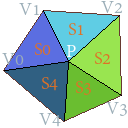
显然,$S_0 + S_1 + S_2 + S_3 + S_4$就是其面积(不需要加绝对值,因为顶点是顺时针排列,所以叉积的结果也是正的)
当点在多边形外,有:
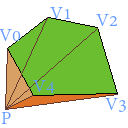
这个时候,$\vec{PV_3}\times \vec{PV_4}$和$\vec{PV_4}\times \vec{PV_5}$的面积都是负数,可以抵消到之前所有三角形面积和中多出的那一部分。
也可以通过此方法来判断多边形的顶点是否是按顺时针排列,如果最后面积大于0就是顺时针,否则是逆时针。
各种相交判断
判断点是否在线段上
使用点积或叉积判断是否在线段所在直线上,然后判断点是否在线段构成的矩形内,不然点可能在线段的延长线上:
| |
判断AABB矩形是否相交以及求出相交矩形
判断AABB矩形是否相交很简单:
| |
(cx1, cy1)和(cx2, cy2)其实就是相交矩形的右下角顶点和左上角顶点。如果右下角顶点在左上角顶点左上方的话,那矩形就不相交了。
判断两线段是否相交
分为两步:
快速排斥实验:判断两线段构成的矩形是否相交,如果矩形不相交线段也一定不相交
跨立实验:使用叉积来判断两线段是否相交:
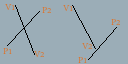
如果像左边一样相交,那么$\vec{V_1V_2}\times \vec{V_1P_1}$,$\vec{V_1V_2}\times \vec{V_1P_2}$一定是异号的,并且同理,$\vec{P_1P_2}\times \vec{P_1V_1}$和$\vec{P_1P_2}\times \vec{P_1V_2}$也是异号的。
如果不相交(如右边),则会有$\vec{P_1P_2}\times \vec{P_1V_2}$和$\vec{P_1P_2}\times \vec{P_1V_1}$同号。
| |
注意第一步快速排斥实验其实也可以不做,但是快速排斥实验很快,在两个线段离得远的时候可以快速返回false而不用进行第二步的叉乘。
判断线段和直线是否相交
和上面判断两线段是否相交差不多,也是使用跨立实验(假设线段两端点为$P_1\ P_2$):
任取直线$L$上一点$Q$,和直线的方向向量$\vec{V}$,如果$\vec{QP_1}\times \vec{V}$和$\vec{QP_2}\times \vec{V}$异号,则相交。
判断AABB矩形和圆是否相交
有很多方法:
先判断矩形是否在圆内(四个顶点到圆心的距离小于圆半径),如果是则相交,否则看圆心到矩形四条边的距离,有小于圆半径的则相交
将矩形的四条边延长,将空间平分为九份:
如果圆心在矩形内则相交,否则
若圆心在矩形的上,下,左,右侧,则直接看圆心和对应边的距离,小于半径则相交
若圆心在矩形的左上,左下,右上,右下,则直接看圆心到对应顶点的距离,小于半径则相交
第一种方法代码简单,但是计算较多。第二种方法代码复杂,但是每条分支的计算很少。
判断点是否在多边形内
Crossing Number Method
此算法基于一个定理:从给定点发出一条射线,如果此点在多边形内,那么这条射线和多边形的交点一定是奇数个,否则是偶数个。
那么这里要解决的问题就是:
- 如何判断射线和边相交
判断射线和边相交很简单,我们先要做两个规定:
顶点按照顺时针排列
我们不要使用复杂的射线,直接用$x = x_0$这条穿过P点的竖直向上的射线。
首先要判断此边是否可能和直线相交:
$$ x_n\le x_0 \le x_{n+1} 或\ x_{n+1} \le x_0 \le x_n $$
然后我们要判断此边是否在直线上方:
$$ \frac{y_0 - y_n}{x_0 - x_n} \lt k $$
使用斜率进行判断即可。
当这两个条件都满足,此边即和直线相交,那么对相交点的计数就+1.
整个的代码可以是这样:
| |
这里cond1和cond2分别对应于顶点顺时针排列和逆时针排列的情况。
这里要注意的是slope处可能出现除0错误,你可以在计算above变量的时候将除法去掉来避免:
| |
Winding Number Method
这个算法利用叉乘的方向性,和上面多边形求面积方法差不多:如果$\vec{PV_0}\times \vec{PV_1},\vec{PV_1}\times \vec{PV_2},\cdots,\vec{PV_{n-1}}\times \vec{PV_n}和\vec{PV_n}\times \vec{PV_0}$ 所得结果的符号都一样的话,那么点就是在多边形内部,否则就是在外部。
判断射线和多边形相交
很简单,假设射线起点为$P$,射线方向为$\vec{D}$,多边形顶点为$V_i$,那么对所有的$\vec{PV_i}\times \vec{D}$的结果都同号的话就是不相交,出现异号就是相交。
判断射线和圆相交
假设射线起点为$P$,方向为$\vec{D}$,圆心为$Q$,半径为$R$。
分两步:
首先判断射线的方向是否朝向圆,若$\vec{PQ}\cdot \vec{D} \lt 0$即不朝向圆,那么一定不相交
否则,使用点到直线距离公式即可判断:$\frac{Ax+By+C}{\sqrt{A^2 + B^2}} \le R$则相交(或者用叉乘也行:$\frac{\vec{PQ}\times \vec{D}}{|\vec{D}|} \le R$即相交)
将凸多边形顶点按照顺时针排列
顺时针排列顶点问题在凹多边形下没有唯一解,所以这里只有凸多边形的情况,算法很简单:
找到最左边的点(x坐标最小)
将这个点和其他点连线,算出直线斜率,然后按照斜率进行排序即可
将简单多边形拆分成数个三角形
未完成