本文描述了3D空间中的旋转,包括使用欧拉角旋转,四元数旋转,绕坐标轴轴旋转,绕旋转轴旋转以及四元数插值。
欧拉角
欧拉角是很直白的旋转方式,其思想就是先绕x轴旋转,再绕y轴旋转,再绕z轴旋转(这里x,y,z的顺序不是固定的)。这样的想法让我们将3D空间的旋转拆分为三个2D平面旋转的组合:
$$ EulerRotateMat = \\ \begin{bmatrix} \cos{\gamma} & -\sin{\gamma} & 0 & 0 \\ \sin{\gamma} & \cos{\gamma} & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}\begin{bmatrix} \cos{\beta} & 0 & \sin{\beta} & 0 \\ 0 & 1 & 0 & 0 \\ -\sin{\beta} & 0 & \cos{\beta} & 0 \\ 0 & 0 & 0 & 1\\ \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos{\alpha} & -\sin{\alpha} & 0 \\ 0 & \sin{\alpha} & \cos{\alpha} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} $$欧拉角的优点是很简洁直观,缺点是由很多问题,这里有一个视频展示了使用欧拉角带来的这些问题(14:20 ~ 17:43)。
万向节死锁问题
万向节死锁仅发生在动态旋转中。
旋转分为两种:静态旋转,动态旋转。静态旋转是指每次旋转的旋转轴都是世界坐标系下的坐标轴(即绕x轴即绕$(1, 0, 0)$,绕y轴即绕$(0, 1, 0)$,z轴则是$(0, 0, 1)$)。而动态旋转则是按照旋转体当前的轴,即旋转体的局部坐标系的轴。
绕任意轴旋转的矩阵
有了欧拉角,我们可以推导出绕任意轴旋转$\theta$角的方法:
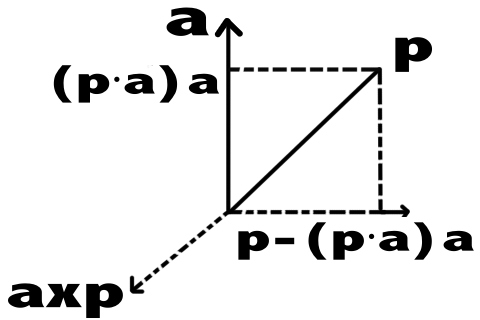 假设$\vec{a}$为旋转轴的单位向量,$p$是旋转的点,那么首先首先$\vec{p}$在$\vec{a}$上的投影为
假设$\vec{a}$为旋转轴的单位向量,$p$是旋转的点,那么首先首先$\vec{p}$在$\vec{a}$上的投影为
那么与a,p在同一平面内,且垂直于a的轴为
$$ p - proj_ap = p - (p\cdot a)a $$然后我们再用叉乘求得垂直于a,(p·a)a的轴:
$$ a \times p $$因为和$a$平行的分量$proj_ap$不受旋转影响,那么这个问题就变成在$a\times p$和$p - (p\cdot a)a$平面中对p的垂直分量进行旋转。这是典型的2D旋转,可以很容易得到:
$$ p^{'}_h = [p - (p\cdot a)a]\cos{\theta} + (a\times p)\sin{\theta} $$然后我们再加上$proj_ap$即可:
$$ p^{'} = p^{'}_v + p^{'}_h = proj_ap + p^{'}_h = (a\cdot p)a + [p - (p\cdot a)a]\cos{\theta} + (a\times p)\sin{\theta} $$化简得
$$ p^{'} = p\cos{\theta} + (a\times p)\sin{\theta} +(1-\cos{\theta})(a\cdot p)a $$接下来将其变为矩阵形式。
$proj_qp$的矩阵形式为
$$ \begin{bmatrix} q_x^2 & q_xq_y & q_xq_z \ q_xq_y & q_y^2 & q_yq_z \ q_xq_z & q_yq_z & q_z^2 \ \end{bmatrix}
\begin{bmatrix} p_x \ p_y \ p_z \ \end{bmatrix}
\frac{1}{|q|^2} $$
而$p\times q$的矩阵表示形式为:
$$ p \times q = \begin{bmatrix} 0 & -p_z & p_y \ p_z & 0 & -p_x \ -p_y & p_x & 0 \ \end{bmatrix}
\begin{bmatrix} q_x \ q_y \ q_z \ \end{bmatrix} $$
我们可以用如上的两个公式将绕轴旋转公式表示成矩阵形式,设$c = \cos{\theta}$,$s = \sin{\theta}$
$$ \begin{bmatrix} c+(1-c)a_x^2 & (1-c)a_xa_y - sa_z & (1-c)a_xa_z + sa_y \\ (1-c)a_xa_y + sa_z & c+(1-c)a_y^2 & (1-c)a_ya_z - sa_x \\ (1-c)a_xa_z - s a_y & (1-c)a_ya_z + sa_x & c + (1-c)a_z^2 \\ \end{bmatrix} $$四元数
四元数可以说是完美解决3D空间旋转的一个绝佳办法,与欧拉角相比只需要多一些数学知识。它由哈密顿发现。当时哈密顿一直在寻找三维空间中的复数(即带有两个虚数单位的复数-三元数),但在经过一座桥时,他突然明白没有办法得到三元数,而是应该再升高一个维度,得到四元数。他当时就将它脑中所想的四元数公式刻在桥上,四元数就诞生了。
基本公式
四元数通俗来说就是有三个虚数单位的复数,回想复数的定义:
$$ \begin{aligned} p & = a\pmb{i} + b \\ \pmb{i}^2 & = -1 \\ \end{aligned} $$而四元数则是有四个虚数单位的复数:
$$ \begin{aligned} p = a\pmb{i} + b\pmb{j} + c\pmb{k} + d \\ \pmb{i}^2 = \pmb{j}^2 = \pmb{k}^2 = -1 \\ \pmb{ij} = \pm{k}, \pmb{jk} = \pmb{i}, \pmb{ki} = \pmb{j} \\ \pmb{ji} = \pmb{k}, \pmb{kj} = -\pmb{i}, \pmb{ik} = -\pmb{j} \\ \end{aligned} $$后面的几条规则可以这样记忆:想象i,j,k分别是3D空间中的x,y,z轴的单位向量,他们的乘积结果总是剩下那个轴的所代表的的虚数单位,而结果的符号则由右手定则确定。而相同虚数单位和自己的乘积总是-1。
一般将四元数记为:
$$ q = \begin{bmatrix} \pmb{q}_v & q_s \end{bmatrix} $$其中矢量部分为$\pmb{q}_v = x\pmb{i} + y\pmb{j} + z\pmb{k}$,而标量部分为$q_s = w$
四元数比欧拉角更优秀的地方在于:
- 没有万向节死锁问题
- 只需要存储四个浮点数,比矩阵表示更加简单
- 四元数求逆,串联等操作比矩阵更加高效
四元数和复数有着很多共通特性,比如,任意一个复数$x\pmb{i}+y$可以在复平面内表示一个点$(x, y)$,而四元数作为四维空间的负数,其$x\pmb{i}+y\pmb{j}+z\pmb{k}+w$表示的则是四维空间中的一个点$(x, y, z, w)$。
再比如,对于复数,我们乘上一个虚数单位其实是将其对应点逆时针旋转了90度。同理,在四元数中乘上某一轴所代表的虚数单位,则是表示绕此轴逆时针旋转90度。
四元数的乘法计算规则如下:
$$ \begin{aligned} p & = \begin{bmatrix}\pmb{p}_v & p_s\end{bmatrix} \\ q & = \begin{bmatrix}\pmb{q}_v & q_s\end{bmatrix} \\ p*q & = \begin{bmatrix}(p_s\pmb{q}_v + q_s\pmb{p}_v + \pmb{p}_v \times \pmb{q}_v) & (p_sq_s - \pmb{p}_v \pmb{q}_v)\end{bmatrix} \end{aligned} $$就是用乘法结合律拆开了计算。这叫做格拉斯曼积。其中$\pmb{p}_v\times\pmb{q}_v$是将p,q的虚部看做向量进行叉积,而$\pmb{p}_v\pmb{q}_v$则是其对应向量的点积。
四元数有很多种乘法,但是格拉斯曼积是最通用的形式。
四元数满足:
- 封闭性:四元数的四则运算结果还是四元数
- 结合律:$(p*q)*r = p*(q*r)$
四元数的单位元素和逆元素:
- 单位元素:$(1, 0, 0, 0)$,任何四元数乘上单位元素都等于自身。
- 逆元素:$q^{-1} = \frac{q^*}{|q|^2}$,任何四元数和其逆相乘为单位元素。
其中$|q|^2$代表其模的平方(即$x^2 + y^2 + z^2 + w^2$),$q^{-1}$则是$q$的共轭(和复数共轭类似:$q^{-1} = w -xi - yj - zk$)。 共轭和逆还有如下性质::
$$ \begin{aligned} q^*q = qq^* = |q|^2 \\ (qp)^* = p^*q^* \\ (qp)^{-1} = p^{-1}q^{-1} \end{aligned} $$四元数表示旋转
只有单位四元数才能表示旋转。因为根据四元数的几何意义,$\pmb{q}_v = x\pmb{i}+y\pmb{j}+k\pmb{k}$代表着3维空间中的三条虚数轴,而$q_s = w$则代表第四维度中垂直于三维的一条轴。
第四维度的轴对我们来说没什么用,我们只需要用到三维的虚数轴就可以了。
首先要将单位四元数视为旋转矢量,其公式如下:
$$ q = \begin{bmatrix}\pmb{q}_v & q_s\end{bmatrix} = \begin{bmatrix}\vec{a}\sin{\frac{\theta}{2}} & \cos{\frac{\theta}{2}}\end{bmatrix} = \begin{bmatrix} a_x\sin{\frac{\theta}{2}} \\ a_y\sin{\frac{\theta}{2}} \\ a_z\sin{\frac{\theta}{2}} \\ \cos{\frac{\theta}{2}} \end{bmatrix} $$$\vec{a}$是旋转轴所在的单位矢量。旋转的方向根据右手定则(前提是你用的是右手系)决定(握住旋转轴,大拇指朝向$\vec{a}$的朝向,四指环绕方向即为旋转方向。
然后再用旋转矢量去旋转物体:
$$ v^{'} = qvq^{-1} = qvq^* $$由于q是单位矢量,由公式$q^{-1} = \frac{q^*}{|q|}$可知q的逆和其共轭是相等的。
这里需要将点$v = [x\ y\ z\ w]$也视为四元数$w + x\pmb{i} + y\pmb{j} + z\pmb{k}$。
这个公式可以化简成不将$v$转化成四元数的版本:
$$ \pmb{v^{'}} = \pmb{v} + 2\pmb{q}_v\times(\pmb{q}_v \times \pmb{v} + q_s\pmb{v}) $$这里只需要单纯的将$\pmb{v}$视为三维的向量即可,此公式还减少了运算量。
和矩阵类似,旋转也可以串接:
$$ \begin{aligned} q_{net} & = q_3q_2q_1 \\ v^{'} & = q_{net}vq_{net}^{-1} = q_3q_2q_1vq_1^{-1}q_2^{-1}q_3^{-1} \end{aligned} $$四元数的旋转也可以写成对应的矩阵形式,只需要将上面的旋转公式用矩阵形式表示即可:
$$ \pmb{R} = \begin{bmatrix} 1-2y^2-2z^2 & 2xy + 2zw & 2xy - 2yw \\ 2xy - 2zw & 1-2x^2 - 2z^2 & 2yz + 2xw \\ 2xz + 2yw & 2yz - 2xw & 1-2x^2 - 2y^2 \\ \end{bmatrix} $$用于旋转的四元数的存储优化
一般来说,四元数需要四个float变量来存储,但是由于用于旋转的四元数必须是单位长度的($x^2+y^2+z^2+w^2 = 1$),所以我们其实可以只存储三个元素,然后另一个元素通过计算得到:
这里还有一个问题是无法确定w的符号。我们可以利用四元数在旋转时q和-q效果一样这个特性,看到w为负数时直接存储$-\pmb{q}_v$即可。这样我们可以默认重现的w一定是正的。
四元数旋转的线性插值
直接对四元数进行插值即可,假设要从$q_a$旋转到$q_b$,那么从a到b之间$\beta$百分点的中间旋转$q_{LERP}$为:
$$ q_{LERP} = LERP(q_a, q_b, \beta) = \frac{(1-\beta)q_a + \beta q_b}{|(1-\beta)q_a + \beta q_b|} = normalize( \begin{bmatrix} (1-\beta)q_{a_x} + \beta q_{b_x} \\ (1-\beta)q_{a_y} + \beta q_{b_y} \\ (1-\beta)q_{a_z} + \beta q_{b_z} \\ (1-\beta)q_{a_w} + \beta q_{b_w} \\ \end{bmatrix}) $$需要注意的是线性插值可能会改变四元数的长度,所以最后要归一化四元数。
这个公式存在一定问题,因为四元数其实表示四维空间中的球体,上面的公式是在超球的弦上插值,这会导致当$\beta$以恒定速率改变时,旋转却并非以很定角速率进行。我们需要在超球面上进行插值才可以:
$$ SLERP(q_a, q_b, \beta) = w_aq_a + w_pq_p $$其中
$$ \begin{aligned} w_a & = \frac{\sin{(1 - \beta)}\theta}{\sin{\theta}} \\ w_p & = \frac{\sin{\beta \theta}}{\sin{\theta}} \\ \end{aligned} $$参考
四元数-基本概念-知乎 四元数和旋转 四元数和旋转(知乎) 《游戏引擎架构 第二版》