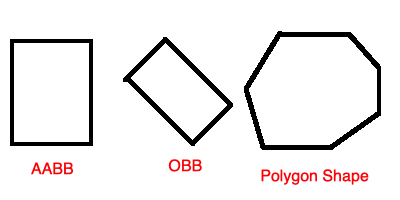
碰撞检测的包围盒一般分为三种:
- AABB包围盒:就是所谓的无矩形包围盒
- OBB包围盒:就是可旋转矩形包围盒
- 多边形包围盒
对于AABB类型的包围盒的碰撞检测很简单,但是对于OBB和多边形的碰撞检测则比较困难。这里主要说明SAT算法,并且将SAT算法应用到OBB包围盒中(多边形同理)。
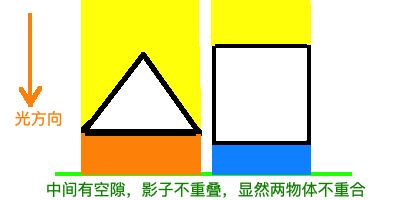
SAT算法全名为分离轴定律(Separate Axis Theory),它的思想是:
将一束平行光照射到物体上,如果在任何角度的照射下,两个物体的影子都会重合,那么这两个物体一定相交
或者你也可以简单理解为“只要存在一个角度,导致影子不重合的话,就不会相交”或者“只要存在一条直线将两个物体分割开来,那么两个物体必然不相交”。
那么我们在代码中要怎么实现呢?其实我们不需要“在任意方向上投影”,我们只需要在两个多边形所在的每个边上投影即可:
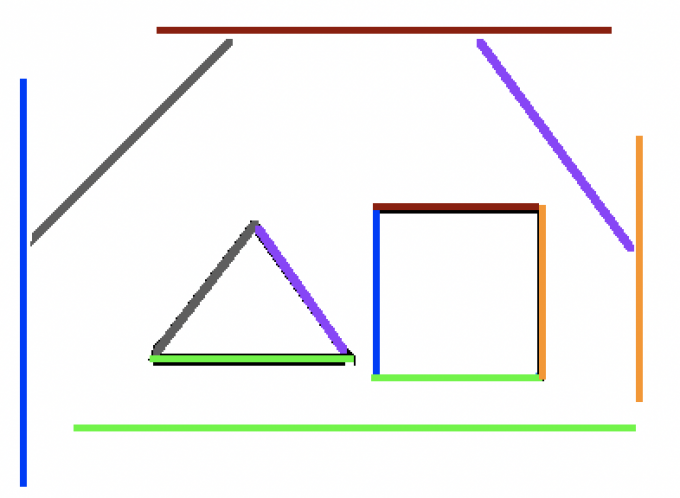
如果其中存在任何一个边上的两个物体的投影不重合,那么这两个物体一定是分离的。相反,如果所有投影轴上的投影都是重合的,那么这两个物体一定是重合的。
SAT算法比起其他的碰撞检测算法更加优秀的一点在于:可以在计算的过程中直接得到最小分离向量。所谓最小分离向量就是讲这两个物体分开的长度最小的向量。有了最小分离向量,我们就可以将两个物体分离了。
最小分离向量的大小就是两个物体影子重合长度最小的那个长度(所有影子重合长度的最小值),方向就是重合长度最小的影子所在的投影轴的方向
SAT是一个很通用的算法,普通的AABB或圆的碰撞检测算法也是可以从SAT推导出来的。
我们这里只实现OBB和OBB的碰撞检测,多边形的道理是一样的。
遵循大问题分解成小问题原则,首先考虑:如果对两个OBB使用SAT,由于OBB的对边是平行的,所以实际上不需要四条投影轴,而是两条就行了,这两条分别是:Vec2(obb1.rotation.GetAxisX(), obb1.rotation.GetAxisY()),Vec2(obb2.rotation.GetAxisX(), obb2.rotation.GetAxisY()) 。
接下来要考虑在这两条投影轴上如何进行投影。这里我的方法是:将其中一个OBB的中点变为原点,并且将其xy轴视为新的xy轴,然后将两一个OBB在这个新坐标系下进行投影:
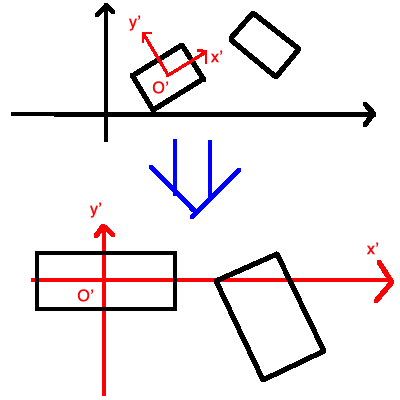
这样的话,我们就连第一个OBB的投影都不需要算了:其在x轴上的投影区间就是[obb1.-half_w, obb1.half_w],在y轴上的投影区间就是[obb1.-half_h, obb1.half_h]。这样我们只需要将注意力放到另一个OBB的投影上即可。
这样的话,剩下的问题就变为:给定一个坐标系,计算OBB中一个边在这个坐标系下的投影。我们只需要分别对这个OBB的四个边进行计算,就可以得到其所有边的投影区间了。
首先,为了表示几何体和投影长度,我们要准备一些数据结构:
OBB的表示如下:
1
2
3
4
5
6
7
| struct OBB{
Vec2 center;
Rot rotation;
real half_w; //宽度的一半
real half_h; //高度的一半
OBB(Vec2 cent, real degree, real w_2, real h_2);
};
|
其中Vec2是2D向量的类,由于向量计算的表示基本都差不多,在此不列举Vec2类的声明。
Rot是使用正弦值和余弦值表示旋转的类(借鉴自Box2D),之所以使用正弦值和余弦值表示,是为了方便得到局部坐标轴:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
| #include <cfloat>
#define FLT_EQ(x, y) (abs(x-y)<=FLT_EPSILON)
class Rot{
public:
Rot():s(0),c(0){}
Rot(real degree){
Set(degree);
}
void Set(real degree){
s = sin(DEG2RAD(degree));
c = cos(DEG2RAD(degree));
}
real GetDegree() const{
return asin(s);
}
//通过这个函数得到OBB旋转后的X轴
Vec2 GetAxisX() const{
return Vec2(c, s);
}
//通过这个函数得到OBB旋转后的Y轴
Vec2 GetAxisY() const{
return Vec2(-s, c);
}
bool operator==(const Rot& rot) const{
return FLT_EQ(rot.s, s)&&FLT_EQ(rot.c, c);
}
bool operator!=(const Rot& rot) const{
return !(*this==rot);
}
private:
real s; //sin value
real c; //cos value
};
|
FLT_EQ宏是使用减法来判断两个浮点数是否相等的宏,FLT_EPSILON则是C++头文件<cfloat>中的常量。
由于我们要计算投影的重合长度,所以这里先定义区间:
1
2
3
4
5
6
7
8
9
10
| class Range{
public:
Range(real a, real b); //自动判断谁大谁小,并赋值给min和max
real Min() const; //返回min
real Max() const; //返回max
real Len() const; //返回max-min
private:
real min;
real max;
};
|
首先来看一下如何将一个OBB的所有点转换到另一个坐标系,如果你学过线性变换会很简单,但是我们这里仍然使用向量数学来推导一下,看图即可明白:
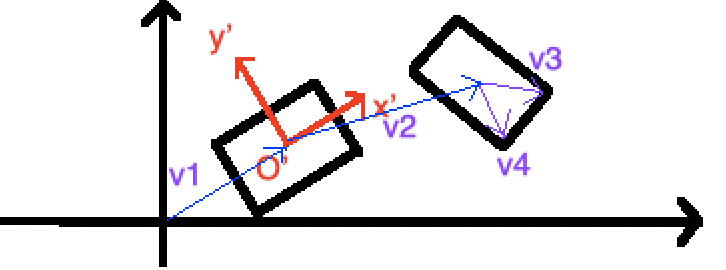
这里v1显然是obb1.center,v2则可以通过obb2.center-obb1.center得到。
然后是v3和v4,有了v3和v4我们才能得到OBB的四个点。由于我们可以通过obb2.rotation.GetAxisX(), obb2.rotation.GetAxisY()来得到其x,y轴的单位向量,所以:
$$
axis_x = obb2.rotation.GetAxisX();axis_y=obb2.rotation.GetAxisY()
$$
$$
v3 = (obb2.center+axis_xobb2.half_w,obb2.center+axis_yobb2.half_h)
$$
$$
v4 = (obb2.center+axis_xobb2.half_w,obb2.center-axis_yobb2.half_h)
$$
那么显然,其四个点相对于O'的坐标就是:
$$
dir = obb2.center-obb1.center;p1=dir+v3-v4;p2=dir+v3+v4;p3=dir-v3-v4;p4=dir-v3+v4
$$
接下来就需要将其四个点的坐标转化为在x'O'y'下的坐标了。很简单,将p1,p2,p3,p4投影到x'和y'上,计算出新的坐标即可。
那么最后转换的代码如下:
1
2
3
4
5
6
7
8
9
10
11
| Vec2 axis_x = obb2.rotation.GetAxisX()*obb2.half_w;
Vec2 axis_y = obb2.rotation.GetAxisY()*obb2.half_h;
Vec2 points[4] = {
axis_x+axis_y + obb2.center,
axis_x-axis_y + obb2.center,
-axis_x-axis_y + obb2.center,
-axis_x+axis_y + obb2.center
};
Coord coord(obb1.center, obb1.rotation);
for(int i=0;i<4;i++)
points[i] = CoordConvert(points[i], coord);
|
这里Coord是用于表示坐标系的结构体,CoordConvert是将点转化到坐标系的函数:
1
2
3
4
5
6
7
8
9
10
11
12
| struct Coord{
Rot rotation;
Vec2 center;
Coord(Vec2 cent, real degree);
Coord(Vec2 cent, Rot rot);
};
Vec2 CoordConvert(Vec2 point, Coord coord){
Vec2 dir = point-coord.center;
//Dot是两个向量的点积
return Vec2(Dot(dir, coord.rotation.GetAxisX()), Dot(dir, coord.rotation.GetAxisY()));
}
|
然后就要考虑,如果将已经转化过的坐标投影到新坐标系下了:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
| //assume points[4] are relate coord
bool __linevsobb(Vec2 axis, real half_len, Vec2 points[4]){
bool result = false;
for(int i=0;i<3;i++)//这里分别对OBB2的四条边进行投影和判断
result = result||__lineprojline(axis, half_len, points[i], points[i+1]);
result = result||__lineprojline(axis, half_len, points[3], points[0]);
//使用逻辑或表示如果存在两条边的投影重合,则相交
return result;
}
//assume p1, p2 is local coord
//这个函数会将边投影,并且计算出投影的重合度
bool __lineprojline(Vec2 axis, real half_len, Vec2 p1, Vec2 p2){
Range r1(ProjectEffect(p1, axis), ProjectEffect(p2, axis)), //将p1,p2投影到坐标系
r2(-half_len, half_len); //由于OBB1原本就是以自己为坐标系,所以我们就直接给出其投影区间,不用计算
//计算重合度
if(__get_range_cover_len(r1, r2)==0) //如果重合长度为0,那么返回false,表示这两条边没有重合
return false;
return true;
}
//计算两个区间重合长度的函数
real __get_range_cover_len(Range range1, Range range2){
if(range1.Min()<range2.Min()){
if(range1.Max()>range2.Min() && range1.Max()<range2.Max())
return range1.Max()-range2.Min();
else if(range1.Max()>=range2.Max())
return range2.Len();
}else{
if(range1.Min()<range2.Max())
if(range1.Max()<=range2.Max())
return range1.Len();
else if(range1.Max()>range2.Max())
return range2.Max()-range1.Min();
}
return 0;
}
|
这样最后我们将上面的函数整合起来:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| bool __onewayobbtest(const OBB& obb1, const OBB& obb2){
//先进行坐标变换
Vec2 axis_x = obb2.rotation.GetAxisX()*obb2.half_w;
Vec2 axis_y = obb2.rotation.GetAxisY()*obb2.half_h;
Vec2 points[4] = {
axis_x+axis_y + obb2.center,
axis_x-axis_y + obb2.center,
-axis_x-axis_y + obb2.center,
-axis_x+axis_y + obb2.center
};
Coord coord(obb1.center, obb1.rotation);
for(int i=0;i<4;i++)
points[i] = CoordConvert(points[i], coord);
//然后判断在(0,1)轴上投影是否重合
if(!__linevsobb(Vec2(0, 1), obb1.half_h, points))
return false;
//判断在(1,0)轴上投影是否重合
if(!__linevsobb(Vec2(1, 0), obb1.half_w, points))
return false;
return true;
}
|
注意这个函数只是将一个OBB的四个边作为投影轴。SAT要求另个多边形的所有边都得作为投影轴,所以最后:
1
2
3
4
| bool OBBvsOBB(const OBB& obb1, const OBB& obb2){
//如果所有投影轴中存在重合,返回true表示碰撞了
return __onewayobbtest(obb1, obb2) && __onewayobbtest(obb2, obb1);
}
|
结果:
优点:
- 可以对于任意的多边形进行碰撞检测,甚至是圆和多边形的碰撞检测(见参考中的网页)
- 可以得知最小分离向量
缺点:
有一个优化方式是,如果两个OBB的旋转角度一样的话,可以直接通过坐标变换将这个问题转化为两个AABB的碰撞检测问题:
1
2
3
4
5
6
7
| bool OBBvsOBBSame(const OBB& obb1, const OBB& obb2){
Coord coord(obb1.center, obb1.rotation);
Vec2 relate_center = CoordConvert(obb2.center, coord);
AABB aabb1(-obb1.half_w, -obb1.half_h, obb1.half_w, obb1.half_h),
aabb2(relate_center.x-obb2.half_w, relate_center.y-obb2.half_h, relate_center.x+obb2.half_w, relate_center.y+obb2.half_h);
return AABBvsAABB(aabb1, aabb2);
}
|
这样可以避免投影,节省很多的速度。
CSDN博客
N网站的教程
gamedevelopment网站的教程,很全