本文讲述了MVP矩阵的意义,投影变换(透视投影和平行投影)矩阵的推导以及视口变换
模型变换
模型变换是将物体从原点移动到他应该在的位置(世界坐标)
视图变换
视图变换主要指摄像机变换。因为存在规定:
摄像机坐标必须在原点
摄像机看向$-z$轴
所以我们需要一些变换作用在世界中的所有物体上,以便于将他们变换到摄像机坐标。
投影变换
这是最后一步,将三维空间的物体(程序中记录的所有物体)投影到二维空间(屏幕)上从而显示他们。
平行投影
平行投影很简单:
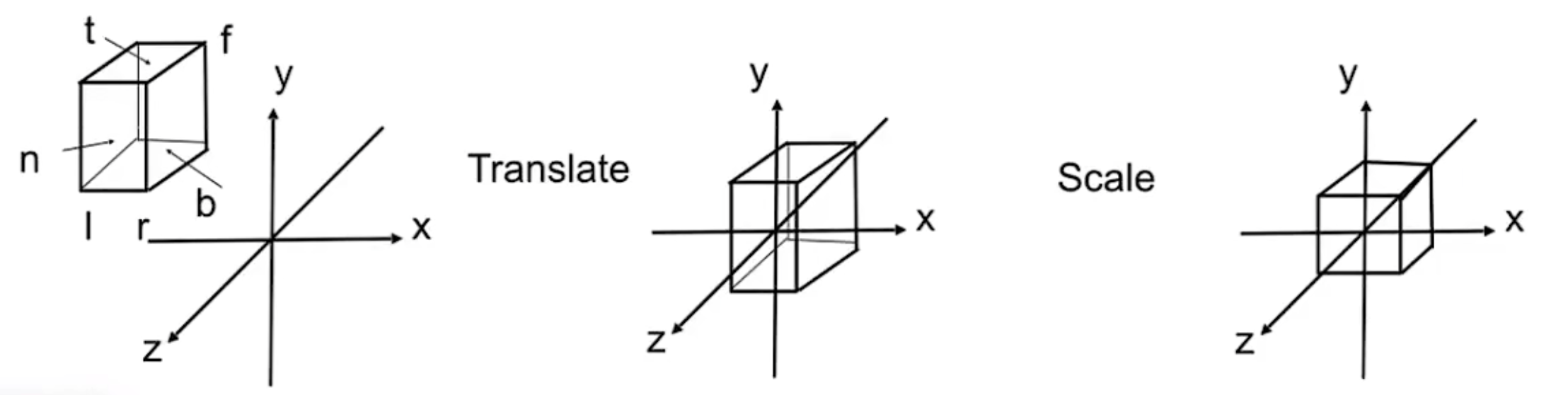
我们的可视范围在这个最左边的长方体里面,我们的目标是将其变换成最右边的标准立方体(即$x, y, z \in [-1, 1]$)。
很简单,先将长方体中心平移到原点(图中间的情况),然后再对长方体进行缩放即可:
$$ \begin{bmatrix} \frac{2}{right - left} & 0 & 0 & 0 \\ 0 & \frac{2}{top - bottom} & 0 & 0 \\ 0 & 0 & \frac{2}{near - far} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 & -\frac{left + right}{2} \\ 0 & 1 & 0 & -\frac{top + bottom}{2} \\ 0 & 0 & 1 & -\frac{near + far}{2} \\ 0 & 0 & 0 & 1 \end{bmatrix} = \\ \begin{bmatrix} \frac{2}{right - left} & 0 & 0 & -\frac{left + right}{right - left} \\ 0 & \frac{2}{top - bottom} & 0 & -\frac{top + bottom}{top - bottom} \\ 0 & 0 & \frac{2}{near - far} & -\frac{near + far}{near - far} \\ 0 & 0 & 0 & 1 \end{bmatrix} $$正交投影
正交投影的推导比较麻烦:
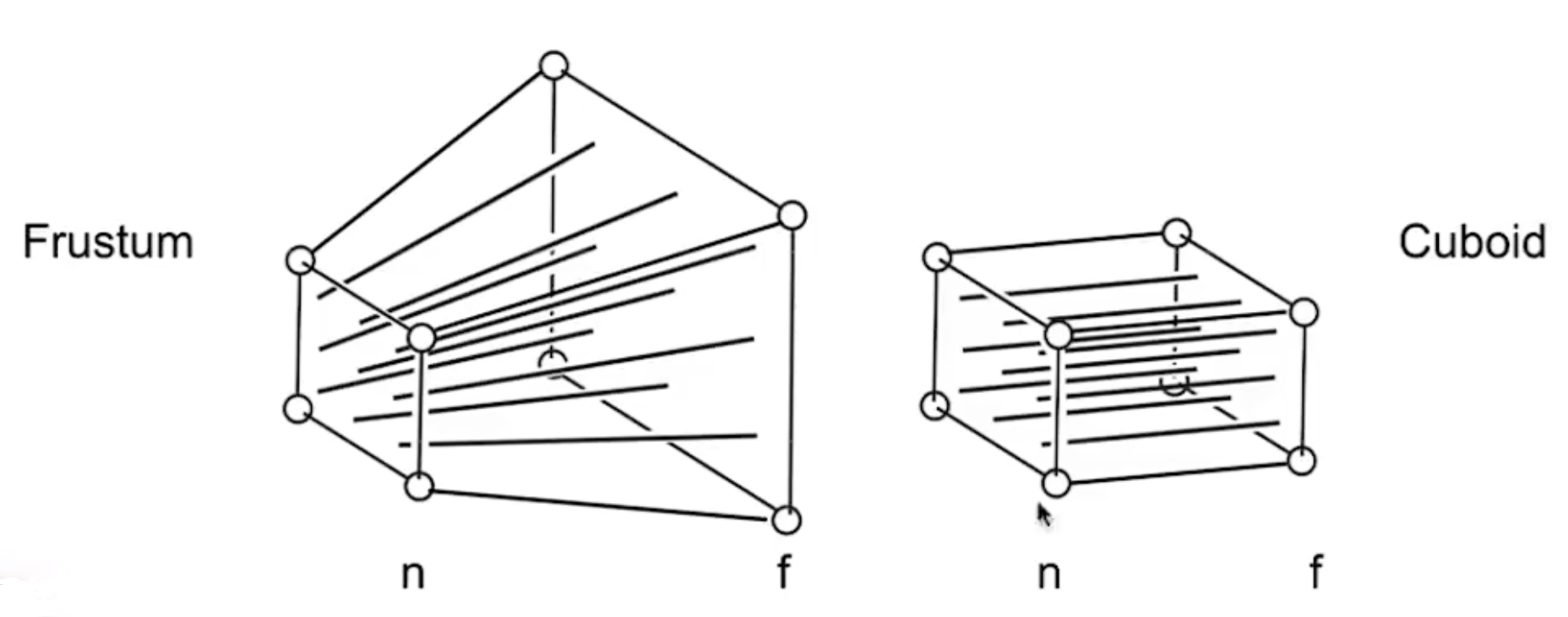
我们采用从平行投影推导到正交投影的方法,你可以想像将透视投影(Frustum)的远平面进行挤压,从而让其四条线平行来得到平行投影。
对于透视投影,我们有如下规定:
挤压前后近平面和远平面位置保持不变(即透视投影和平行投影的近,远平面的z值是一样的)
进平面上的点挤压前后不会发生变化
远平面的中心点挤压前后不会发生变化
有了上面两条规定,就可以推导出透视投影了,这里的公式为:
$$ M_{persp} = M_{ortho}M_{persp\_to\_ortho} $$我们现在要求的就是$M_{persp\_to\_ortho}$矩阵。
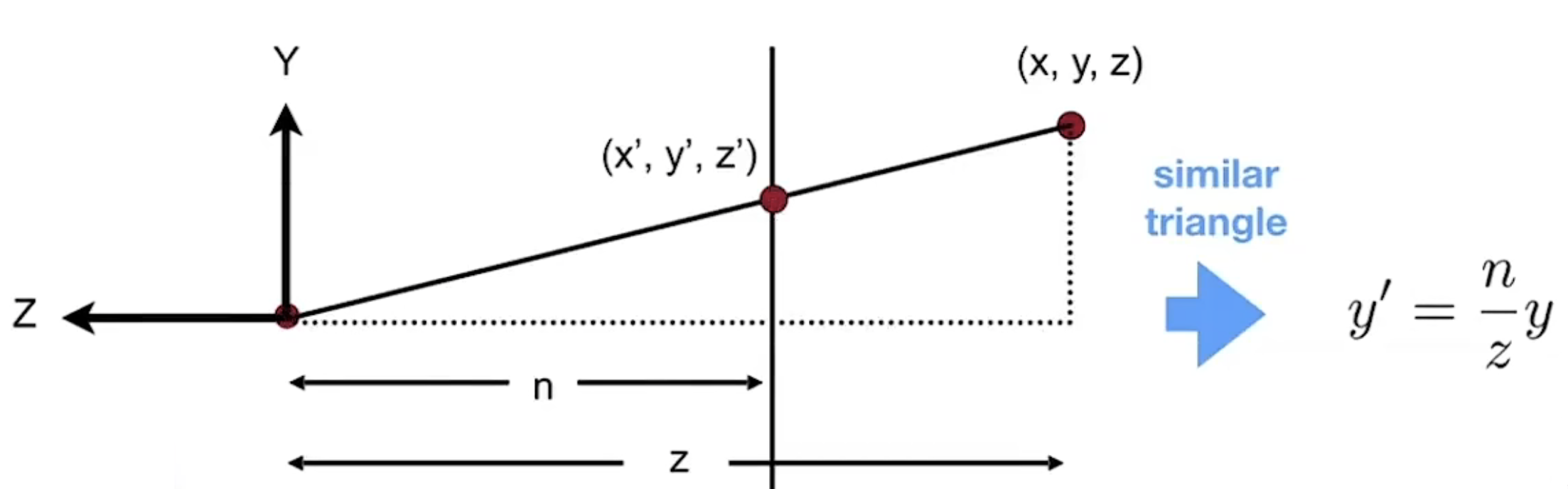
从侧面来看这个Frustum,$(x, y, z)$是视锥内的一点,$(x^{'},y^{'},z^{'})$是其经过变换后的点(确定这个点的方法是从原点做到$(x, y, z)$点的直线,和近平面的交点)
显然,由相似三角形得知:
$$ y^{'} = \frac{n}{z}y $$那么同理,x的坐标也可以知道:
$$ x^{'} = \frac{n}{z}x $$那么我们现在已经知道两个坐标了,接下来就是解$z$坐标:
$$ \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} \frac{n}{z}y \\ \frac{n}{z}x \\ ? \\ 1 \end{pmatrix} $$首先根据齐次坐标性质,对齐次向量乘上常数不改变向量表示的点,那么我们直接乘上$z$,将除式消去:
$$ \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} \frac{n}{z}y \\ \frac{n}{z}x \\ ? \\ 1 \end{pmatrix} {multiply\ z} \Rightarrow \begin{pmatrix} ny \\ nx \\ ? \\ z \end{pmatrix} $$那么我们现在的$M_{persp\_to\_ortho}$就是:
$$ M_{persp\_to\_ortho} = \begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ a & b & c & d \\ 0 & 0 & 1 & 0 \end{bmatrix} $$其中$a, b, c, d$都是未知量。
然后我们使用上面说的两条规定:
规定二告诉我们,近平面上的点在挤压前后不会发生变化,这意味着当$z=n$时,有:
$$ \begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix} \Rightarrow \begin{pmatrix} nx \\ ny \\ n^2 \\ n \end{pmatrix} $$也就是说通过$M_{persp\_to\_ortho}$矩阵的变换,有:
$$ \begin{pmatrix} a & b & c & d \end{pmatrix} \begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix} = n^2 $$显然,最后的结果$n^2$和$x,y$没有半毛钱关系,这意味着一定有
$$ a = 0, b = 0 $$那么我们可以得到方程:
$$ \begin{pmatrix} 0 & 0 & c & d \end{pmatrix} \begin{pmatrix} x \ y \ n \ 1 \end{pmatrix}
cn + d
n^2 $$
规定三告诉我们,远平面的中心点挤压之后也不发生改变,这意味着有:
$$ \begin{pmatrix} 0 & 0 & c & d \end{pmatrix} \begin{pmatrix} 0 \ 0 \ f \ 1 \end{pmatrix}
cf + d = f^2 $$
由上述两个方程联立可解得:
$$ \begin{matrix} c & = n + f \\ d & = -nf \end{matrix} $$这样结果就出来了:
$$ M_{persp\_to\_ortho} = \begin{bmatrix} near & 0 & 0 & 0 \\ 0 & near & 0 & 0 \\ 0 & 0 & near+far & -near far \\ 0 & 0 & 1 & 0 \end{bmatrix} $$$$ M_{persp} = M_{ortho}M_{persp_to_ortho} = \ \begin{bmatrix} \frac{2}{right - left} & 0 & 0 & -\frac{left + right}{right - left} \ 0 & \frac{2}{top - bottom} & 0 & -\frac{top + bottom}{top - bottom} \ 0 & 0 & \frac{2}{near - far} & -\frac{near + far}{near - far} \ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} near & 0 & 0 & 0 \ 0 & near & 0 & 0 \ 0 & 0 & near+far & -near\ far \ 0 & 0 & 1 & 0 \end{bmatrix}
\begin{bmatrix} \frac{2n}{r - l} & 0 & -\frac{r+l}{r-l} & 0 \ 0 & \frac{2n}{t-b} & -\frac{t+b}{t-b} & 0 \ 0 & 0 & \frac{n+f}{n-f} & \frac{2fn}{f-n} \ 0 & 0 & 1 & 0 \end{bmatrix} $$
OpenGL的做法则是对$n$和$f$取绝对值:
$$ \begin{bmatrix} \frac{2|n|}{r - l} & 0 & -\frac{r+l}{r-l} & 0 \\ 0 & \frac{2|n|}{t-b} & -\frac{t+b}{t-b} & 0 \\ 0 & 0 & \frac{|n|+|f|}{|n|-|f|} & \frac{2|f||n|}{|n|-|f|} \\ 0 & 0 & -1 & 0 \end{bmatrix} \\ $$更一般的做法是通过四个参数来确定投影矩阵:
fov:纵向的视角大小aspect:近平面的宽高比zNear:近平面到摄像机距离(即到原点距离)zFar:远平面到摄像机距离(即到原点距离)
通过这些可以计算出:
- 近平面高度H:$H = 2zNear\times \tan{\frac{fov}{2}}$
- 近平面宽度W:$W=2aspect\times zNear\times \tan{\frac{fov}{2}}$
这样可以得到
- $t = \frac{H}{2}$
- $b = -\frac{H}{2}$
- $l = -\frac{W}{2}$
- $r = \frac{W}{2}$
注意zNear和zFar是到原点的距离,不是近,远平面的坐标,所以为了和上面平行投影矩阵合二为一,我们需要用到的是近远平面坐标。假设进平面坐标为$n$,远平面坐标为$f$,就有:
最终的结果就是:
$$ \begin{bmatrix} \frac{2n}{W} & 0 & 0 & 0 \\ 0 & \frac{2n}{H} & 0 & 0 \\ 0 & 0 & \frac{n + f}{n - f} & \frac{2fn}{f - n} \\ 0 & 0 & 1 & 0 \\ \end{bmatrix} = \\ \begin{bmatrix} \frac{n}{|n|aspect\times \tan{0.5fov}} & 0 & 0 & 0 \\ 0 & \frac{n}{|n|\tan{0.5fov}} & 0 & 0 \\ 0 & 0 & \frac{n + f}{n - f} & \frac{2fn}{f - n} \\ 0 & 0 & 1 & 0 \\ \end{bmatrix} $$Viewport
w前面我们使用了投影矩阵将场景归一化到$[-1, 1]^3$中,而视口变换则是将$[-1,1]^3$转换到$[x, x+width]\times [y, y+height]\times [0, d]$上,也就是我们真正的屏幕坐标中。
$$ \begin{bmatrix} \frac{width}{2} & 0 & 0 & 0 \ 0 & \frac{height}{2} & 0 & 0 \ 0 & 0 & \frac{d}{2} & 0 \ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & \frac{width}{2} + x \ 0 & 1 & 0 & \frac{height}{2} + y \ 0 & 0 & 1 & 1 \ 0 & 0 & 0 & 1 \end{bmatrix}
=
\begin{bmatrix} \frac{width}{2} & 0 & 0 & \frac{width}{2} + x \ 0 & \frac{height}{2} & 0 & \frac{height}{2} + y \ 0 & 0 & \frac{d}{2} & 1 \ 0 & 0 & 0 & 1 \end{bmatrix} $$
一般的屏幕坐标是以窗口左上角为原点,x轴向右,y轴向下。现在我们视口的中心是在(0, 0)处也就是左上角原点位置,并且z值一般在(0, 1)之间。所以我们一般取$x = y = 0$,$d = 1$。